欧拉角、万向锁、四元数
[TOC]
比较好的资料
- 维基百科-欧拉角
- 维基百科-Gimbal lock
- Bonus: Gimbal Lock
-- - 知乎-如何通俗地解释欧拉角?之后为何要引入四元数?
-- - 知乎-四元数——基本概念
- 知乎-四元数——旋转
- 知乎-旋转之一复数与2D旋转
- 维基百科-四元数与空间旋转
- 维基百科-四元数
欧拉角
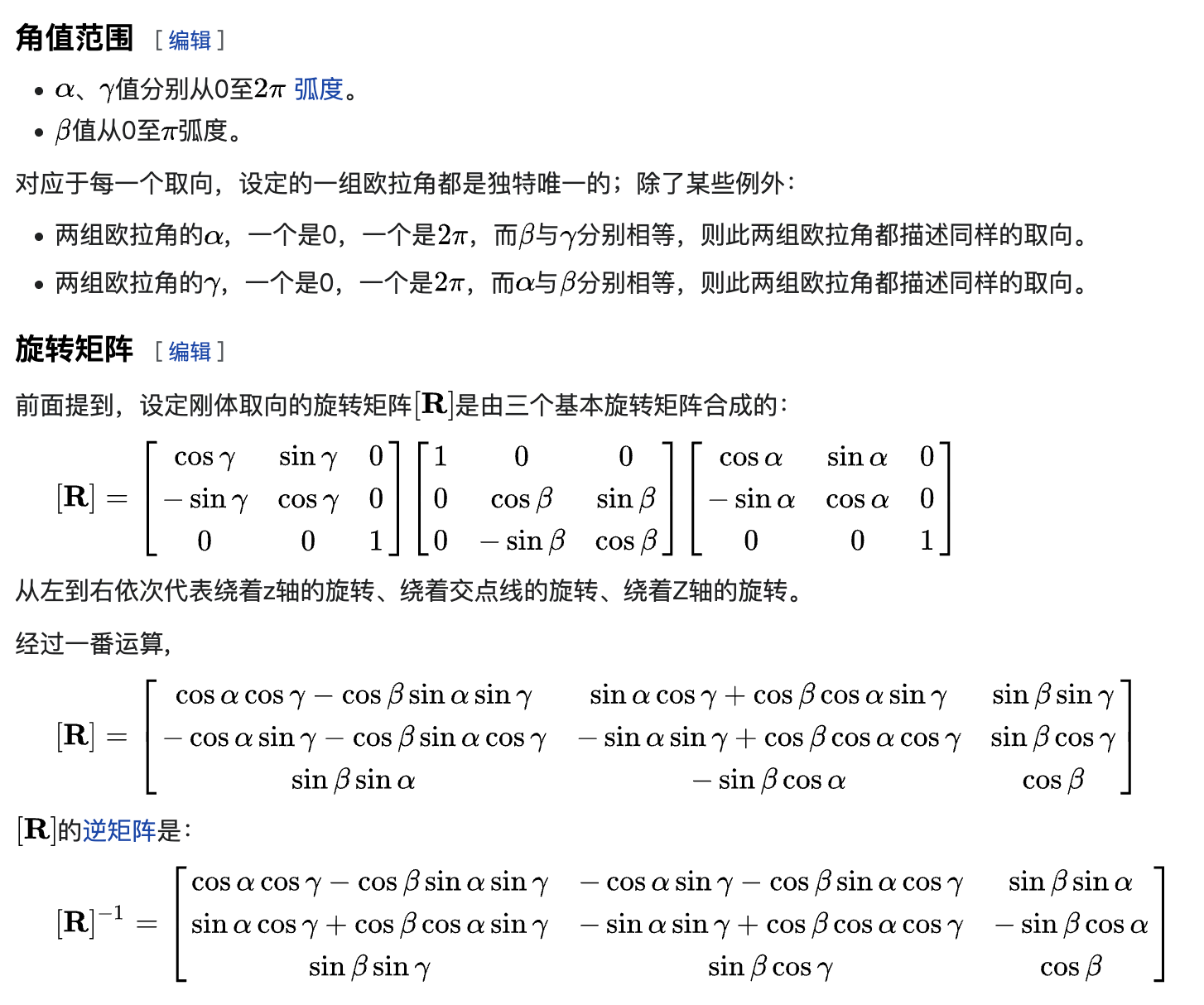
莱昂哈德·欧拉用欧拉角来描述刚体在三维欧几里得空间的取向。换句话说,任何关于刚体旋转的旋转矩阵是由三个基本旋转矩阵复合而成的。
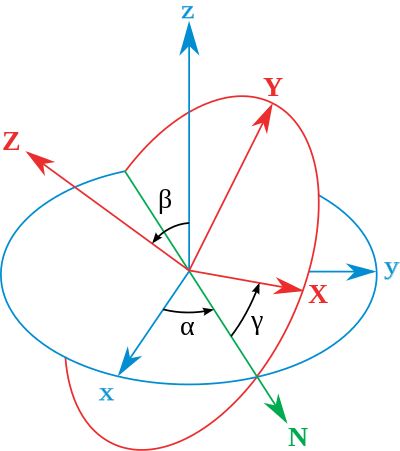
参阅上图。设定xyz-轴为参考系的参考轴。称xy-平面与XY-平面的相交为交点线,用英文字母(N)代表。zxz顺规的欧拉角可以静态地这样定义:
- alpha 是x-轴与交点线的夹角,
- beta 是z-轴与Z-轴的夹角,
- gamma 是交点线与X-轴的夹角。
很可惜地,对于夹角的顺序和标记,夹角的两个轴的指定,并没有任何常规。科学家对此从未达成共识。每当用到欧拉角时,我们必须明确的表示出夹角的顺序,指定其参考轴。
-
pitch 俯仰角
-
yaw 偏航角
- roll 翻滚角
万向锁 gimbal_lock
我的理解,欧拉角之所以自由灵活的转动是因为三个轴不在一个平面上,而像下图,上下翻转90度使得两个轴在一个平面时会发生死锁。
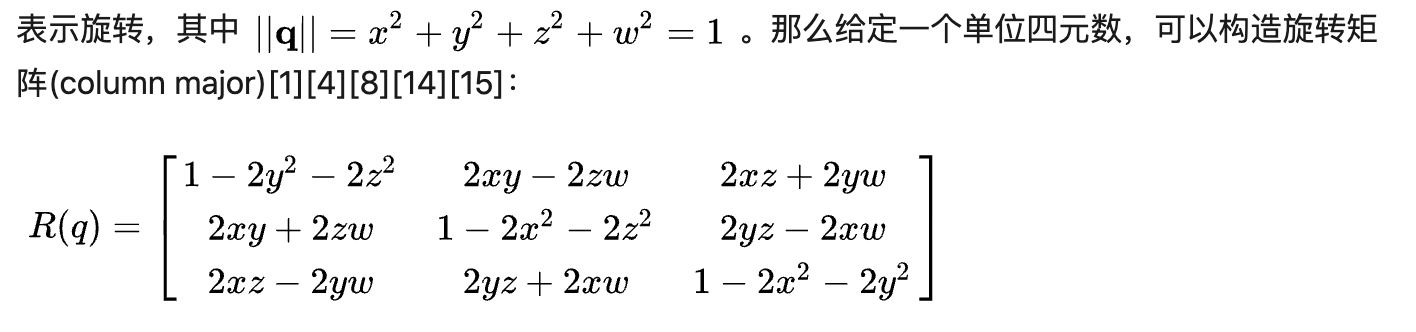
四元数
复数和旋转
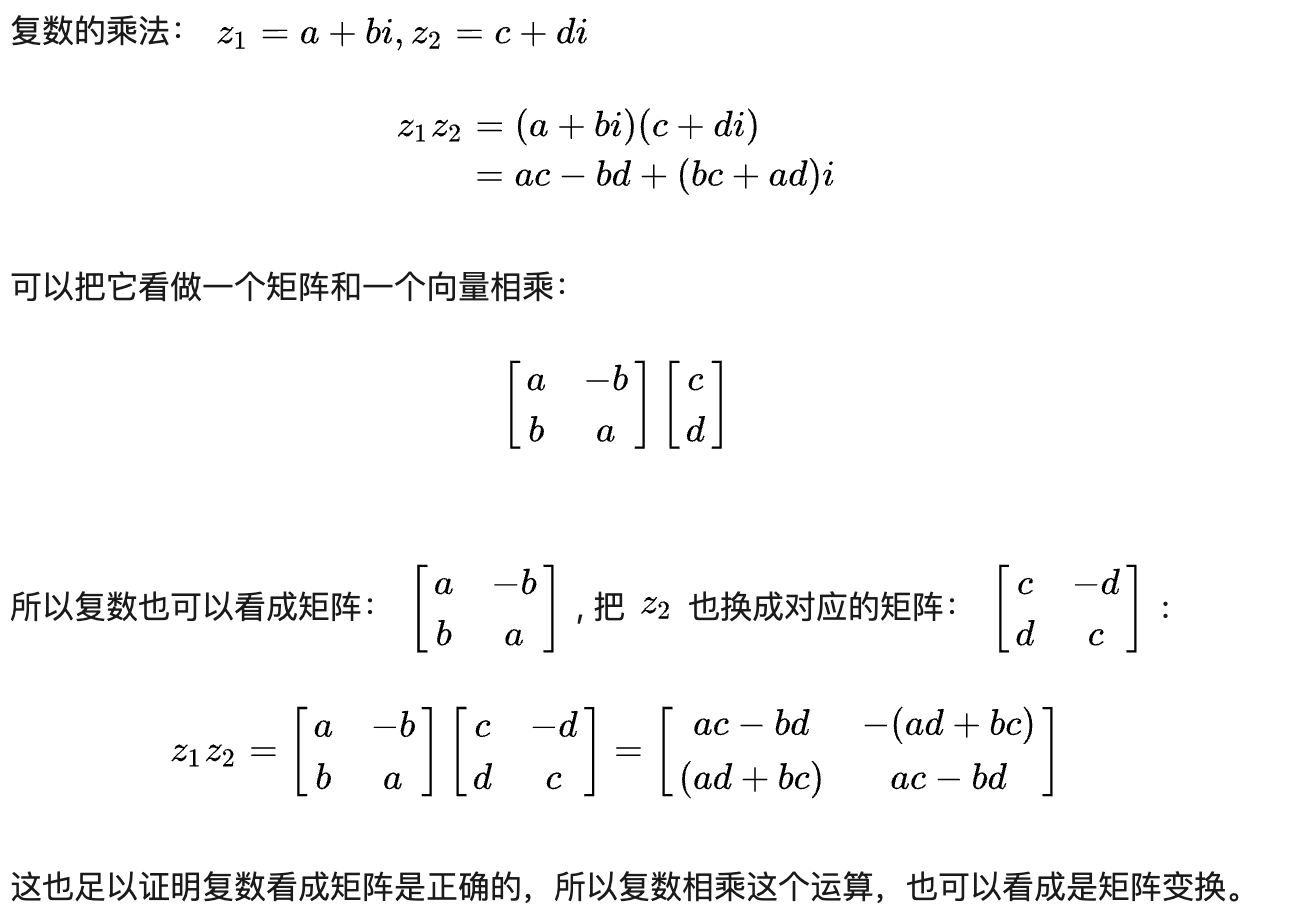
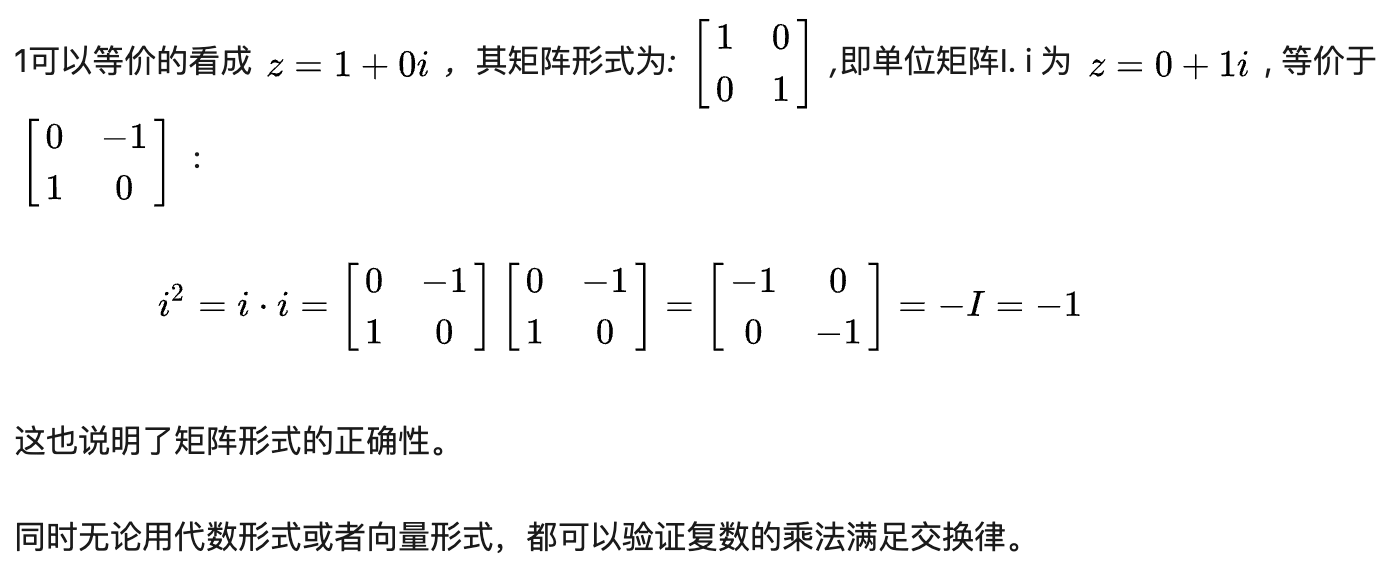
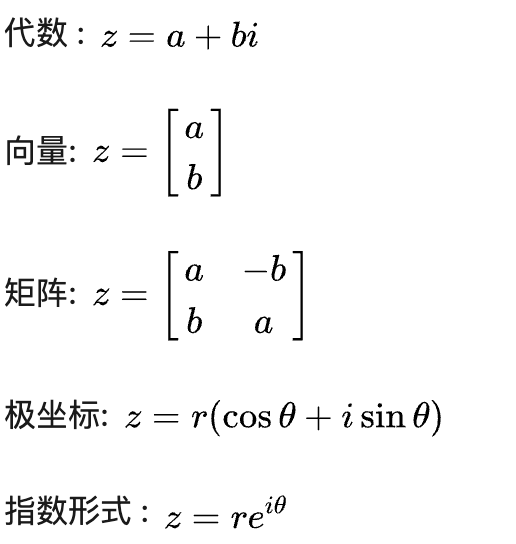
复数的矩阵表示

模与共轭
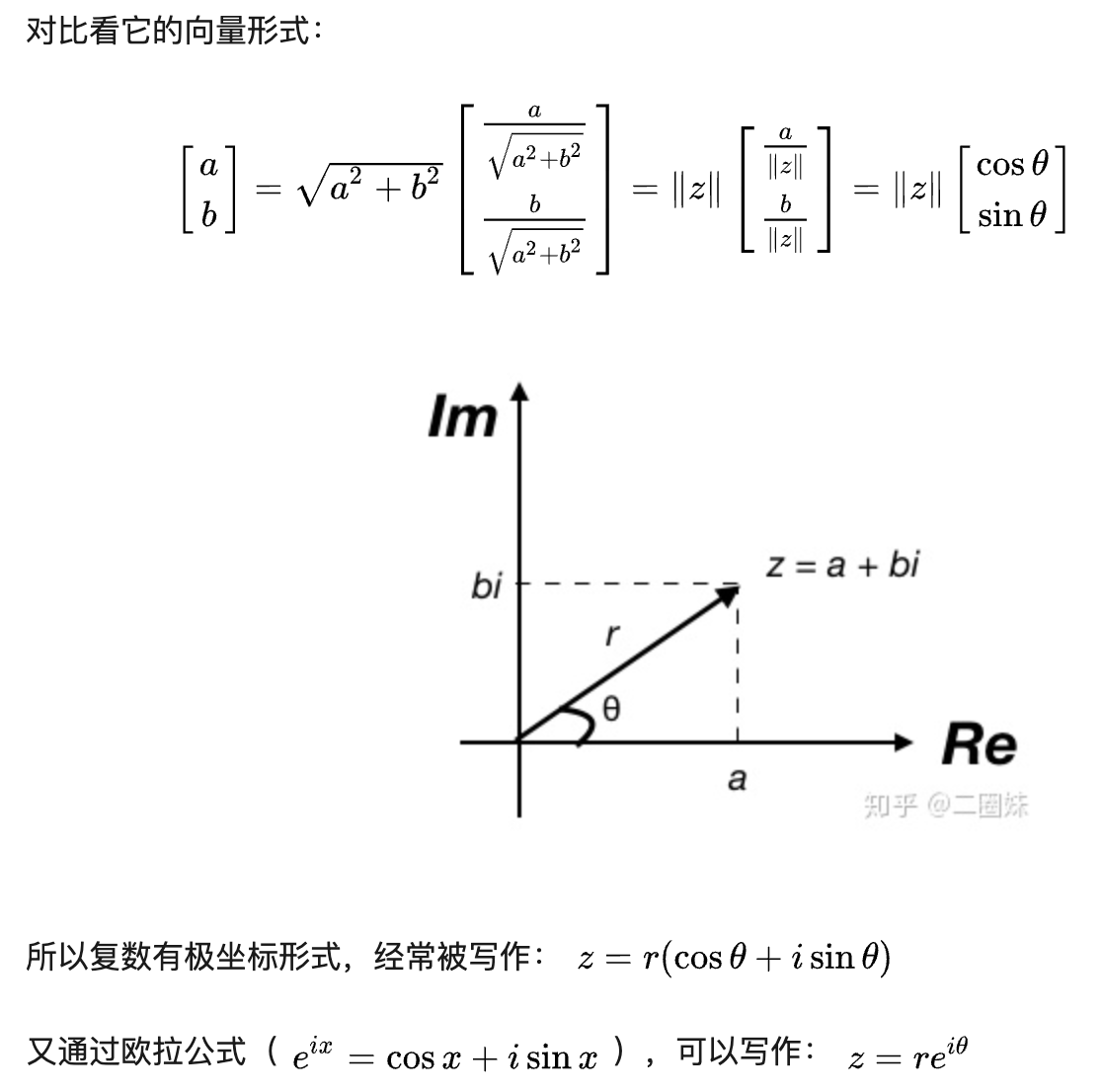
复数的表示方法
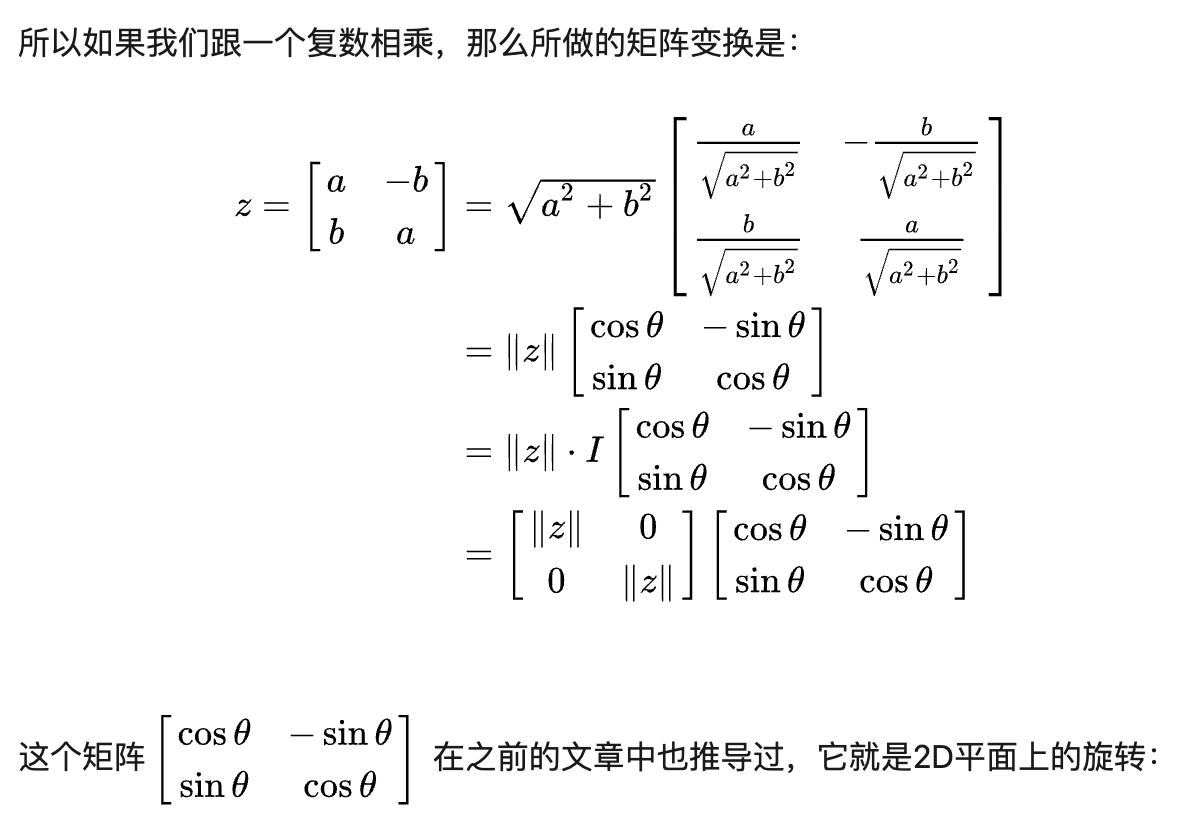
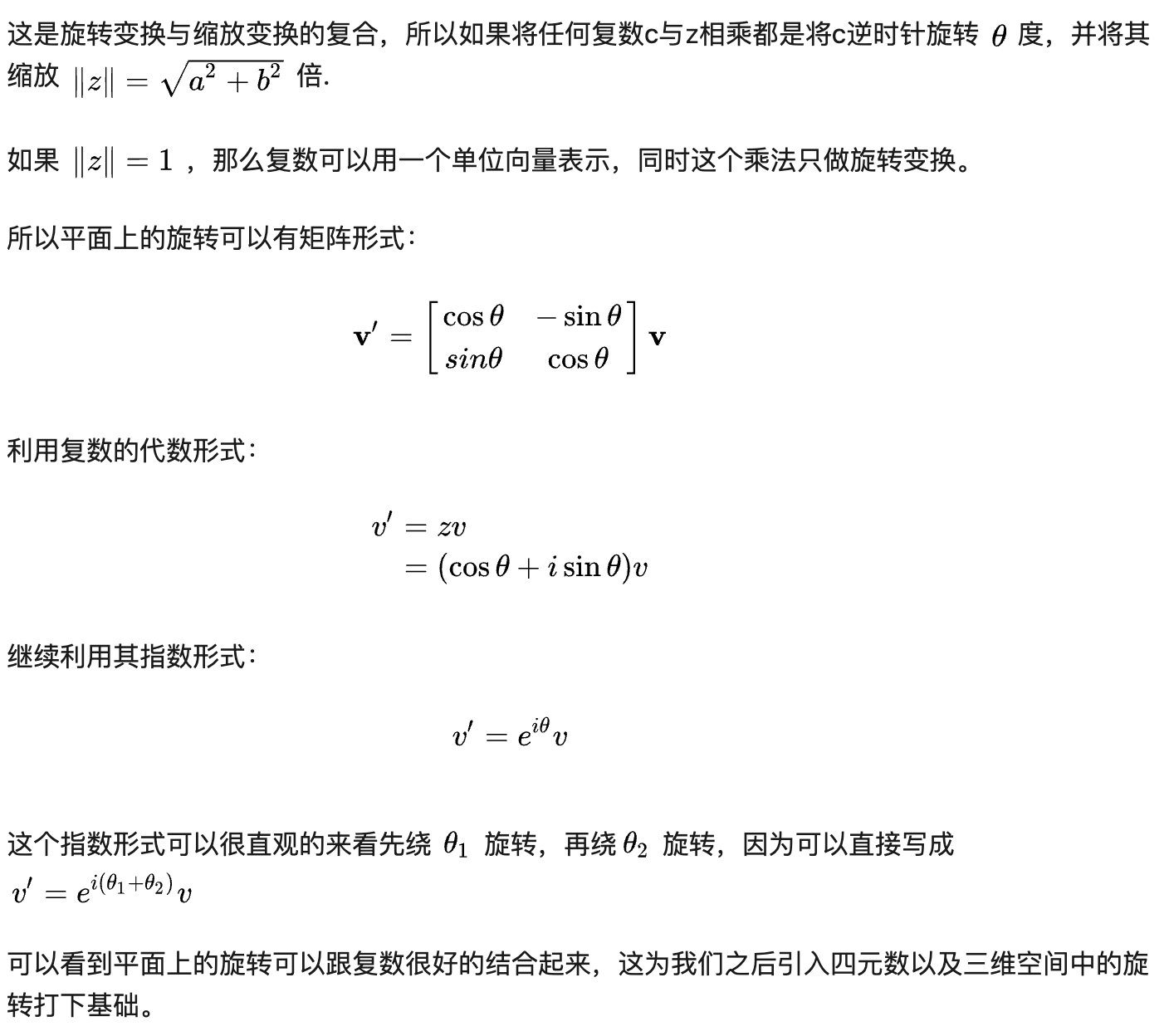
复数和旋转
四元数旋转
glm::mat4 model = glm::mat4(1.0f); //创建一个单位矩阵
glm::qua<float> q = glm::qua<float>(glm::radians(glm::vec3(0.0f, 0.0f, 90.0f))); //创建一个绕z轴旋转90度的四元数
model = glm::mat4_cast(q) * model; //得到一个旋转的模型矩阵